

Wearable Robotics
Exoskeletons
Human-Robot Symbiosis
We develop personalized controller that either uses the neuromechanical models of users or adapts to their intention and needs.
We also develop techniques for real-time estimation of human-robot states and metrics for objective evaluation of human-robot interaction.

Development and Testing of Novel Controllers
We are developing controllers that can be personalized to the user's needs and adapt based on their intention. This includes time-independent controllers (such as virtual energy regulator), adaptive reference controllers and hybrid state-feedback controllers.
Sample publications:
Virtual Energy Regulator (R. Nasiri et al., IEEE RA-L 2021, Nasiri et al., PlosOne 2024)
Hybrid Torque Control (H. Dinovitzer et al., IEEE RA-L 2023)
Online Adaptive Reference Control (M. Shushtari et al., IEEE RA-L 2021)
Adaptive Assistance Control (R. Nasiri et al., Robotics 2021)
Neuromuscular control (F. Dzeladini et al., Biorob 2016)
Real-time Gait Phase and Joint Torque Estimators
Leveraging the Flexibility of Novel Deep Neural Networks Structures we developed real-time robust gait phase estimators and joint torque estimators that can work for various gait conditions including pathological gaits or walking with exoskeletons for unseen users.
For the joint kinematics based estimator see
Ultra-robust Gait Phase Estimation (M. Shsutari et al., IEEE TNSRE 2022)
IMU-based Robust Gait Phase (L. Tang et al., Sensors 2024)
Real-time Joit Torque estimation (H. Dinovitzer et al., IEEE RA-L 2023)
Human-Robot Interaction
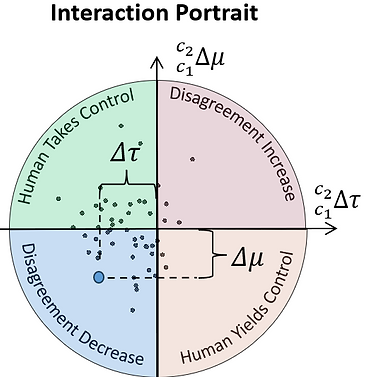
We have been developing tools to quantitatively evaluate human-robot interaction and interaction quality (see the interaction portrait paper for the latter).
Human-exoskeleton Interaction Torque Estimation (M. Shushtari & A. Arami, Robotics 2023)
Interaction Portrait (M. Shushtari et al., arXive 2024)